
Hoy vamos a deducir cuáles son las transformaciones de coordenadas que relacionan dos sistemas de referencia inerciales basándonos en los postulados de la relatividad especial. Antes de comenzar con el tema propiamente dicho vamos a definir lo que entendemos por unidades geométricas.
Unidades geométricas
El objetivo de emplear unidades geométricas es doble. De un lado, se trata de que en los diagramas espacio-tiempo las unidades que miden el espacio y el tiempo estén suficientemente compensadas como para que una magnitud tan grande como la velocidad de la luz — cuando se expresa en unidades convencionales — sea mucho más manejable.
De otro, buscamos que en la representación 4-dimensional podamos hacer geometría, hacer medidas de longitudes, áreas y volúmenes. Para ello es imprescindible que en todos los ejes coordenados tengamos las mismas unidades.
En realidad estamos muy acostumbrados a utilizar unidades geométricas. Lo hacemos desde hace ya mucho cuando en astronomía clásica se introdujo el concepto de año-luz: el espacio que recorre la luz en un año. De esta forma, medimos el espacio en años.
Si en lugar de traducir el espacio a unidades de tiempo nos planteamos pasar el tiempo a unidades de espacio obtenemos lo que sería un metro de tiempo: es el tiempo que emplea la luz en recorrer un metro. Así pues se tiene la siguiente fórmula
![\[ t \quad \text{[en metros]} \quad = \quad c \times t \quad \text{[en segundos]} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-b6b2afc06ebdc25cb97459655a92e0e1_l3.png "Rendered by QuickLaTeX.com")
de modo que 1 metro de tiempo es un valor muy pequeño de segundos, en concreto: 1 metro de tiempo es  segundos donde
segundos donde  se expresa en metros/segundo con el conocido valor de
se expresa en metros/segundo con el conocido valor de  .
.
Con esta forma de proceder tenemos que:
1. los metros siguen midiéndose en metros,
2. los segundos ahora se miden en metros de acuerdo a la anterior expresión, y
3. la velocidad en unidades geométricas se relaciona con la velocidad clásica en los siguientes términos
![\[ v \quad \text{[adimensional]} \quad = \quad \frac{v \quad \text{[en metros/segundo]}}{c} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-e8936e23c01933272e38b99db59b86c5_l3.png "Rendered by QuickLaTeX.com")
de suerte que la velocidad de la luz es unitaria (salvo el signo). A partir de ahora, y salvo que se indique lo contrario, trabajaremos siempre con unidades geométricas.
Propiedades de los sistemas inerciales
Partimos de dos sistemas  y
y  que son inerciales con coordenadas
que son inerciales con coordenadas  y
y  . Un sencillo ejercicio demuestra que el movimiento relativo entre ambos tiene velocidad
. Un sencillo ejercicio demuestra que el movimiento relativo entre ambos tiene velocidad  constante. A continuación vamos a definir dos propiedades que satisfacen los sistemas inerciales:
constante. A continuación vamos a definir dos propiedades que satisfacen los sistemas inerciales:
Dado cualquier sistema de referencia inercial con coordenadas , ¿qué podemos decir de en relación a estas dos propiedades? Se tienen los siguientes hechos:
1. Homogeneidad temporal. Todos los instantes de tiempo  son indistinguibles y equivalentes para la física.
son indistinguibles y equivalentes para la física.
2. Homogeneidad espacial. Todos los lugares del espacio son indistinguibles y equivalentes para la física pues el espacio  es euclídeo. (Hay un razón más profunda para esto: tiene curvatura seccional constante.)
es euclídeo. (Hay un razón más profunda para esto: tiene curvatura seccional constante.)
3. Isotropía espacial. Todas las direcciones espaciales son igual de buenas e indistinguibles para la física. (Aquí estamos afirmando que nuestro espacio se curva por igual en todas las direcciones. En el caso de un sistema inercial la curvatura es cero en todas las direcciones.)
4. NO isotropía temporal. En relación a la dimensión temporal los dos (únicos) sentidos posibles son el futuro y el pasado. Evidentemente, ambos son distinguibles desde el punto de vista físico. Hay muchos procesos físicos que nos indican hacia dónde apunta la flecha del tiempo. El más evidente de todos es el aumento de la entropía. (¿Conoces alguno más?)
Utilizando la homogeneidad y la isotropía espacial es posible elegir coordenadas cartesianas en ambos sistemas y para que los ejes  y
y  sean coincidentes en todo instante de tiempo y apunten además en la dirección y el sentido de la velocidad relativa que relaciona a ambos sistemas. Utilizando ahora la homogeneidad temporal podemos elegir
sean coincidentes en todo instante de tiempo y apunten además en la dirección y el sentido de la velocidad relativa que relaciona a ambos sistemas. Utilizando ahora la homogeneidad temporal podemos elegir  exactamente cuando los orígenes de ambos sistemas sean coincidentes. Finalmente, utilizando de nuevo la isotropía espacial podemos rotar el plano
exactamente cuando los orígenes de ambos sistemas sean coincidentes. Finalmente, utilizando de nuevo la isotropía espacial podemos rotar el plano  hasta hacer coincidentes los ejes
hasta hacer coincidentes los ejes  y
y  con los ejes
con los ejes  y
y  . (Coincidentes tanto en dirección como en sentido. Aquí es necesario asumir que las bases de cada uno de los sistemas tienen la misma orientación.)
. (Coincidentes tanto en dirección como en sentido. Aquí es necesario asumir que las bases de cada uno de los sistemas tienen la misma orientación.)
Lo que resulta de hacer estas suposiciones está bien dibujado en el siguiente esquema:
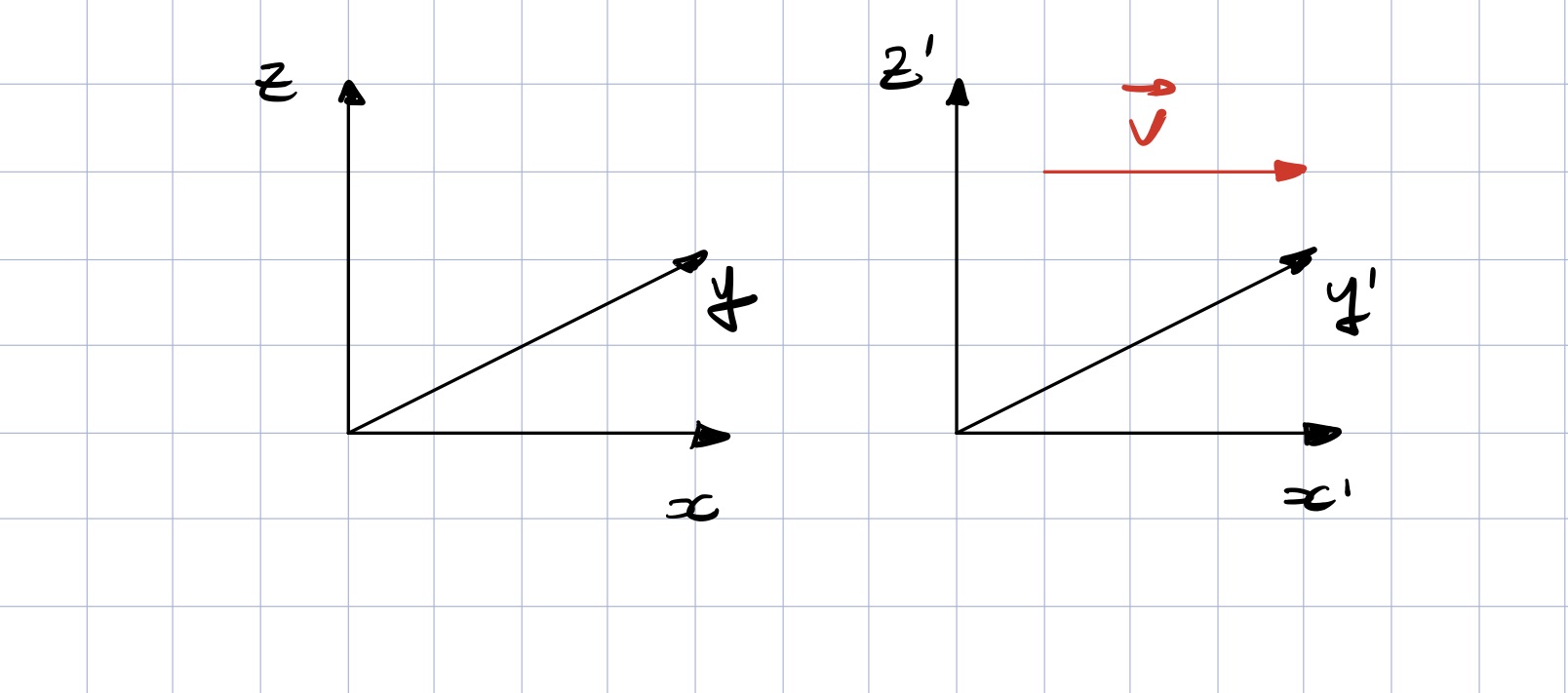
Esta configuración tan apañada se suele llamar configuración estándar y nos sirve para eliminar ruido y cuentas innecesarias. Ya en la época de Galileo se sabía que la mecánica para ambos sistemas se relaciona mediante las ecuaciones
![\[ \begin{cases} x' = x -vt \\ y'=y \\ z'=z \\ t'=t \end{cases} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-7e0ac9ef9d490c0b59afc6c3f22f8596_l3.png "Rendered by QuickLaTeX.com")
Estas transformaciones de Galileo funcionan genial para la mecánica clásica de modo que las leyes de Newton son invariantes frente a este cambio de coordenadas. De estas transformaciones se deduce rápidamente la ley de adición clásica de velocidades. Así, si  denota una partícula moviéndose por el eje en -coordenadas, sus coordenadas correspondientes en vienen dadas por
denota una partícula moviéndose por el eje en -coordenadas, sus coordenadas correspondientes en vienen dadas por  de suerte que la relación entre las velocidades está dada por
de suerte que la relación entre las velocidades está dada por
![\[ \dot{x'}(t)=\dot{x}(t)-v. \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-82fed60dd9b0940b2a482e9c1802f9c5_l3.png "Rendered by QuickLaTeX.com")
Las transformaciones de Lorentz
Observemos que los postulados de Einstein están en clara confrontación con estas transformaciones[mfn]Concretamente, el que está en conflicto es el segundo postulado.[/mfn]. Si  representa un rayo de luz entonces ambos sistemas deberían siempre medir la velocidad para por lo que obtendríamos
representa un rayo de luz entonces ambos sistemas deberían siempre medir la velocidad para por lo que obtendríamos  . En consecuencia, debemos encontrar unas nuevas transformaciones para relacionar dos sistemas de referencia inerciales que sean compatibles con los postulados de Einstein.
. En consecuencia, debemos encontrar unas nuevas transformaciones para relacionar dos sistemas de referencia inerciales que sean compatibles con los postulados de Einstein.
A grandes rasgos necesitamos una transformación de la forma
![\[ (x,y,z,t) \Longrightarrow (x',y',z',t') \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-4474f5a77480e812f722a2acd1d7746f_l3.png "Rendered by QuickLaTeX.com")
que sea compatible con los postulados y que relacione ambos sistemas. Evidentemente, existen infinitas posibilidades para elegir esta transformación así que vamos a acotar el campo de búsqueda imponiendo las restricciones físicas de la teoría. Por otra parte, debemos recordar que esto no es una deducción matemática sino que es una búsqueda cuya validez depende del resultado final no del proceso seguido. (La física es resultadista 😉 como Mourinho.)
En primer lugar supondremos que ambos sistemas se encuentran en configuración estándar. Esto se asumible ya que no hemos modificado nuestras hipótesis sobre las características de los sistemas de referencia inerciales.

De esta forma reducimos así el problema de buscar 4 funciones al desafío de encontrar 20 números reales donde cuatro de ellos se corresponden con las constantes independientes de la transformación afín. Podemos asumir que estos cuatro números son cero ajustando el origen de nuestros sistemas, algo totalmente legítimo usando la homogeneidad del espacio y el tiempo.

Deducción de las transformaciones de Lorentz
A continuación presentamos en formato manuscrito la deducción de las transformaciones de Lorentz. Recordemos que se trata de una cuenta física y no matemática en el sentido de que las cosas valen cuando explican correctamente cómo funciona la realidad. Existe en la literatura una gran cantidad de modos y formas para calcular estas transformaciones pero a nosotros nos gusta especialmente la que mostramos a continuación. La referencia utilizada es:
World fastest derivation of the Lorentz transformations.
Alan Macdonald. Am.J.Phys. 49, 483 (1981)
En concreto, estamos utilizando una versión mejorada de este último artículo proporcionada por el propio Macdonald en su página web. Puedes consultar aquí el PDF de dicha mejora.
De esta forma, consideremos y dos sistemas de referencia inerciales en configuración estándar. Por todo lo comentado en las anteriores secciones podemos reducir el estudio a dos dimensiones  Para encontrar las transformaciones únicamente asumimos las siguientes hipótesis:
Para encontrar las transformaciones únicamente asumimos las siguientes hipótesis:
Observemos que H2 hace referencia a un hecho que ya hemos estudiado en la dilatación del tiempo de modo que nosotros conocemos de modo explícito la función  aunque nos podemos permitir el lujo de mantenerla oculta porque vamos sobradísimos. 😀
aunque nos podemos permitir el lujo de mantenerla oculta porque vamos sobradísimos. 😀
De hecho, obtendremos una expresión explícita para dentro del marco de esta deducción. Observemos también que sólo depende del módulo de la velocidad relativa entre los sistemas. (Más exactamente, del valor absoluto ya que estamos en 1D.)
En primer lugar se tiene que la línea del universo de está dada por la ecuación  . Llamaremos
. Llamaremos  a dicha recta. Observemos que esto ocurre, si y sólo si,
a dicha recta. Observemos que esto ocurre, si y sólo si,  ya que el sistema está en configuración estándar en relación a . Consideremos el siguiente experimento: el observador emite un pulso de luz en
ya que el sistema está en configuración estándar en relación a . Consideremos el siguiente experimento: el observador emite un pulso de luz en  , éste rebota en un espejo situado en la posición
, éste rebota en un espejo situado en la posición  y regresa al observador en
y regresa al observador en  . Podemos ilustrarlo con el siguiente diagrama:
. Podemos ilustrarlo con el siguiente diagrama:

La condición H2 puede expresarse en los siguientes términos:  A lo largo de la recta se cumple que:
A lo largo de la recta se cumple que:
(1) 
donde en la ultima igualdad estamos usando que al estar en la recta . Análogamente se tiene:
(2) 
donde de nuevo usamos que al estar en la recta . A continuación observemos que  debe ser constante tanto en como en ya que la pendiente de la recta
debe ser constante tanto en como en ya que la pendiente de la recta  que une dichos puntos es -1. Lo mismo podemos afirmar para la cantidad
que une dichos puntos es -1. Lo mismo podemos afirmar para la cantidad  .
.
Conclusión: la ecuación (1) es válida tanto en (obvio) como en .
Aplicamos el mismo argumento ahora para el rayo de luz que, partiendo de , alcanza el evento . Como ahora la pendiente de  es 1, la ecuación (2) es válida tanto en como en .
es 1, la ecuación (2) es válida tanto en como en .
Conclusión: las ecuaciones (1) y (2) son válidas en que es un lugar arbitrario del espacio-tiempo. Sumando ambas:

De suerte que nos queda
(3) 
Si en lugar de sumar hacemos la diferencia entre (1) y (2) llegamos a
(4) 
¿Cómo terminamos?
Final 1
La hipótesis  hace referencia a los tiempos que mide respecto de un reloj solidario con que marca el tiempo
hace referencia a los tiempos que mide respecto de un reloj solidario con que marca el tiempo  . Recordemos que esto es simplemente la fórmula que apareció en el reloj de luz para la dilatación del tiempo donde
. Recordemos que esto es simplemente la fórmula que apareció en el reloj de luz para la dilatación del tiempo donde  en la fórmula
en la fórmula
![\[ t=\frac{t_0}{\sqrt{1-\frac{v^2}{c^2}}}. \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-4582d4c32d82915b87405cb462c43f44_l3.png "Rendered by QuickLaTeX.com")
Así se llega a que
![\[ \gamma(v)=\frac{1}{\sqrt{1-v^2}} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-aff3da9f9ed7ceaa06f548a9bf5900f2_l3.png "Rendered by QuickLaTeX.com")
que es lo que se conoce como el factor de Lorentz. (Recordemos que estamos trabajando en unidades geométricas.) Las transformaciones quedan, en definitiva, en los siguientes términos:
![\[ \begin{cases} x=\frac{1}{\sqrt{1-v^2}}(x'+vt')\\ t=\frac{1}{\sqrt{1-v^2}}(vx'+t'). \end{cases} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-acec2652921ac30883041626831e7fd7_l3.png "Rendered by QuickLaTeX.com")
Final 2
Si escribimos  en (4) entonces se tiene
en (4) entonces se tiene  que describe el movimiento del origen de en términos del observador . Así, tiene velocidad
que describe el movimiento del origen de en términos del observador . Así, tiene velocidad  respecto de . Intercambiamos los roles de y y la ecuación (1) quedaría así:
respecto de . Intercambiamos los roles de y y la ecuación (1) quedaría así:
(5) 
donde hemos utilizado que  por la hipótesis H1. Ponemos ahora (5) en (1) y sale
por la hipótesis H1. Ponemos ahora (5) en (1) y sale

y se obtiene finalmente
![\[ \gamma(v)=\frac{1}{\sqrt{1-v^2}}. \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-5d13b30d9a8eacd024c6d0f1eda3a560_l3.png "Rendered by QuickLaTeX.com")
En cualquier caso, para los dos finales, se lleva a la expresión de las transformaciones de Lorentz que escribimos tomando la inversa:
![\[ \begin{cases} x'=\frac{1}{\sqrt{1-v^2}}(x-vt)\\ t'=\frac{1}{\sqrt{1-v^2}}(-vx+t). \end{cases} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-92eb3a1113b22b8c0cef33eda3444685_l3.png "Rendered by QuickLaTeX.com")
En la próxima lección exprimiremos estas transformaciones y veremos muchas de sus consecuencias.