Para formular la Relatividad General debemos dominar, entre otras cosas, lo que a finales del siglo XIX se conocía como Cálculo Diferencial Absoluto por un lado y la Geometría de Riemann por otro.
En pocas palabras, debemos ser capaces de trabajar en espacios abstractos de cualquier dimensión con una geometría arbitraria. Para hacer más suave esta transición nos vamos a apoyar en la geometría de curvas y superficies del espacio euclídeo usual. En esta lección explicaremos de forma somera estos conceptos. (Si alguien necesita una introducción más detallada para estos temas puede consultar textos como [CiPa], [dCa] y [MoRo].)
Superficies regulares
El primer concepto básico con el que vamos a trabajar es la noción de superficie regular  . Recordemos que una superficie regular es un subconjunto de
. Recordemos que una superficie regular es un subconjunto de  con una serie de propiedades bastante restrictivas: debe ser localmente homeomorfo al plano, debe admitir transiciones diferenciables de unas coordenadas a otras y no puede presentar ni picos, ni aristas ni autointersecciones.
con una serie de propiedades bastante restrictivas: debe ser localmente homeomorfo al plano, debe admitir transiciones diferenciables de unas coordenadas a otras y no puede presentar ni picos, ni aristas ni autointersecciones.
En entornos pequeños cada superficie puede ser parametrizado por una aplicación diferenciable  que nosotros escribiremos en los siguientes términos:
que nosotros escribiremos en los siguientes términos:

La aplicación recibe el nombre de parametrización y su función primordial es asignar coordenadas planas para los puntos de la superficie. Así cada punto  de la misma se identifica con sus correspondientes coordenadas
de la misma se identifica con sus correspondientes coordenadas  vía la aplicación de suerte que
vía la aplicación de suerte que  . Evidentemente, un mismo punto puede admitir diferentes coordenadas dadas por distintas parametrizaciones y
. Evidentemente, un mismo punto puede admitir diferentes coordenadas dadas por distintas parametrizaciones y  . Lo que es relevante aquí es que tenemos una forma suave para transformar coordenadas de en coordenadas de .
. Lo que es relevante aquí es que tenemos una forma suave para transformar coordenadas de en coordenadas de .
Finalmente, debemos señalar que cualquier objeto geométrico definido en términos de coordenadas debe pasar una prueba importante: dicho objeto debe ser independiente de las coordenadas escogidas. Esto es, debe ser coordinate-free o también covariante. El significado de esta última afirmación se hará cada vez más claro conforme vayamos avanzando en estas lecciones.
Asociada a cada parametrización están los vectores tangentes  y
y  en el punto
en el punto  dados por
dados por
![\[ X_i(q)=\frac{\partial X}{\partial u^{i}}(q), \quad i=1,2. \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-15d8607bde248423b951651d4af063f9_l3.png "Rendered by QuickLaTeX.com")
1. Recordemos aquí el convenio de Einstein para los sumatorios: si un índice se repite tanto como superíndice y como subíndice entonces debemos considerar que estamos sumando en dicho índice de suerte que  .
.
Ambos vectores constituyen la base del plano tangente a la superficie en el punto  y dicho plano se suele denotar por
y dicho plano se suele denotar por  . Por otro lado, como está dentro del espacio
. Por otro lado, como está dentro del espacio  podemos considerar el normal a en que está dado (salvo el signo) por
podemos considerar el normal a en que está dado (salvo el signo) por
![\[ N=\frac{X_1 \wedge X_2}{|X_1 \wedge X_2|} \]](https://gravitacion.es/wp-content/ql-cache/quicklatex.com-57c22a28a18b2178692a46227c10f23e_l3.png "Rendered by QuickLaTeX.com")
donde hemos prescindido de los argumentos a la izquierda y  en la derecha.
en la derecha.
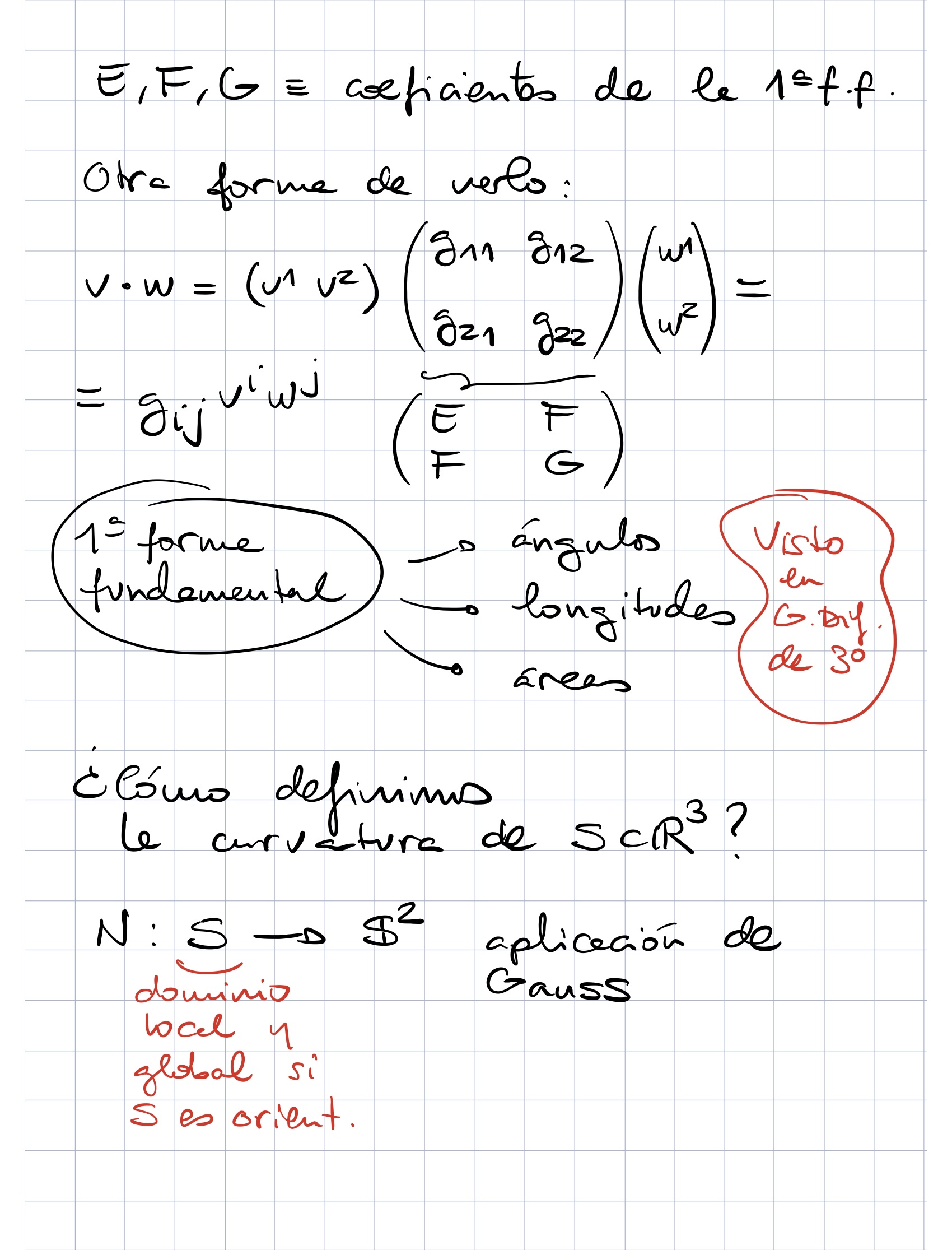
Finalmente, si  y
y  son dos vectores del plano tangente1, entonces el producto escalar euclídeo para vectores tangentes de la superficie se escribe así:
son dos vectores del plano tangente1, entonces el producto escalar euclídeo para vectores tangentes de la superficie se escribe así:


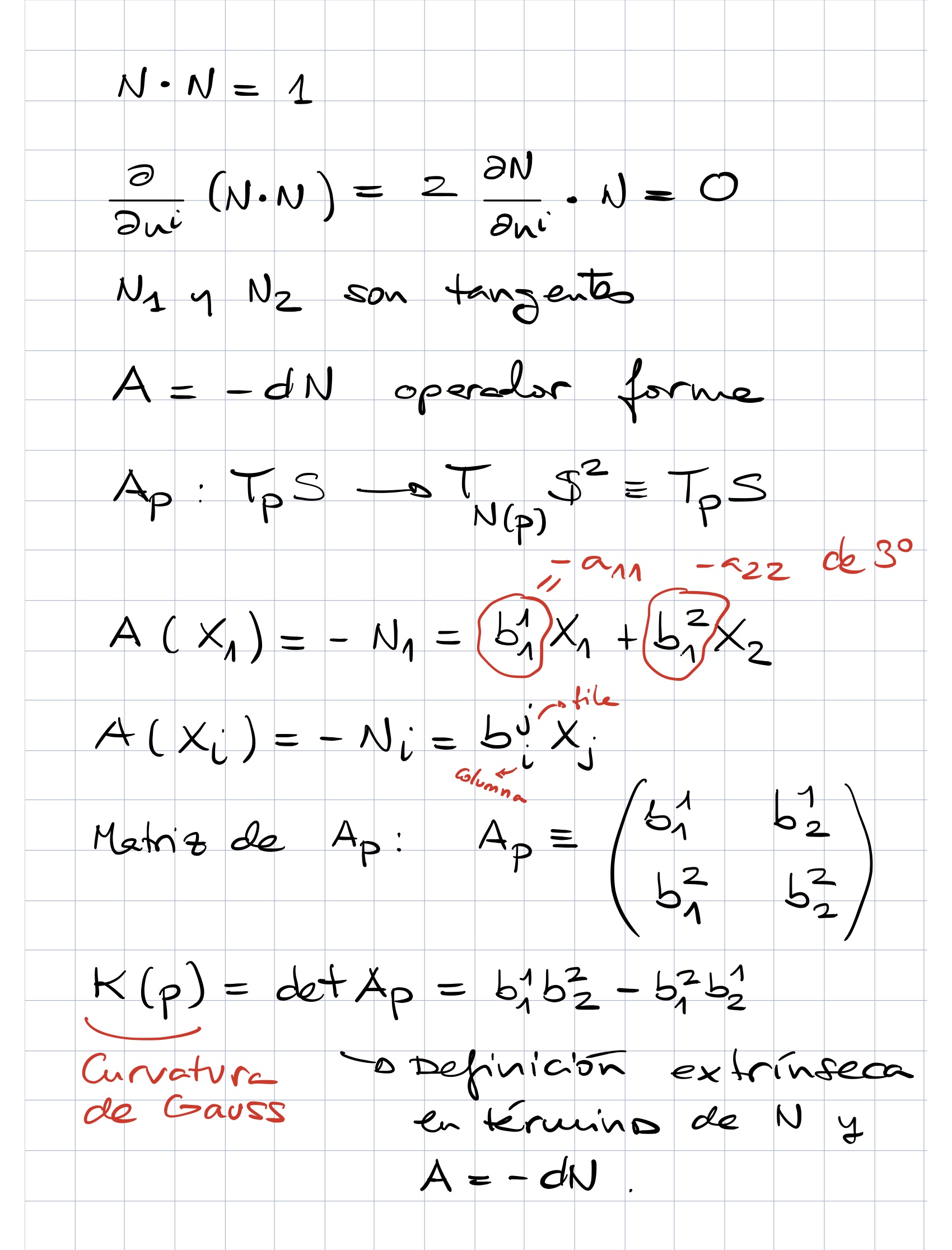
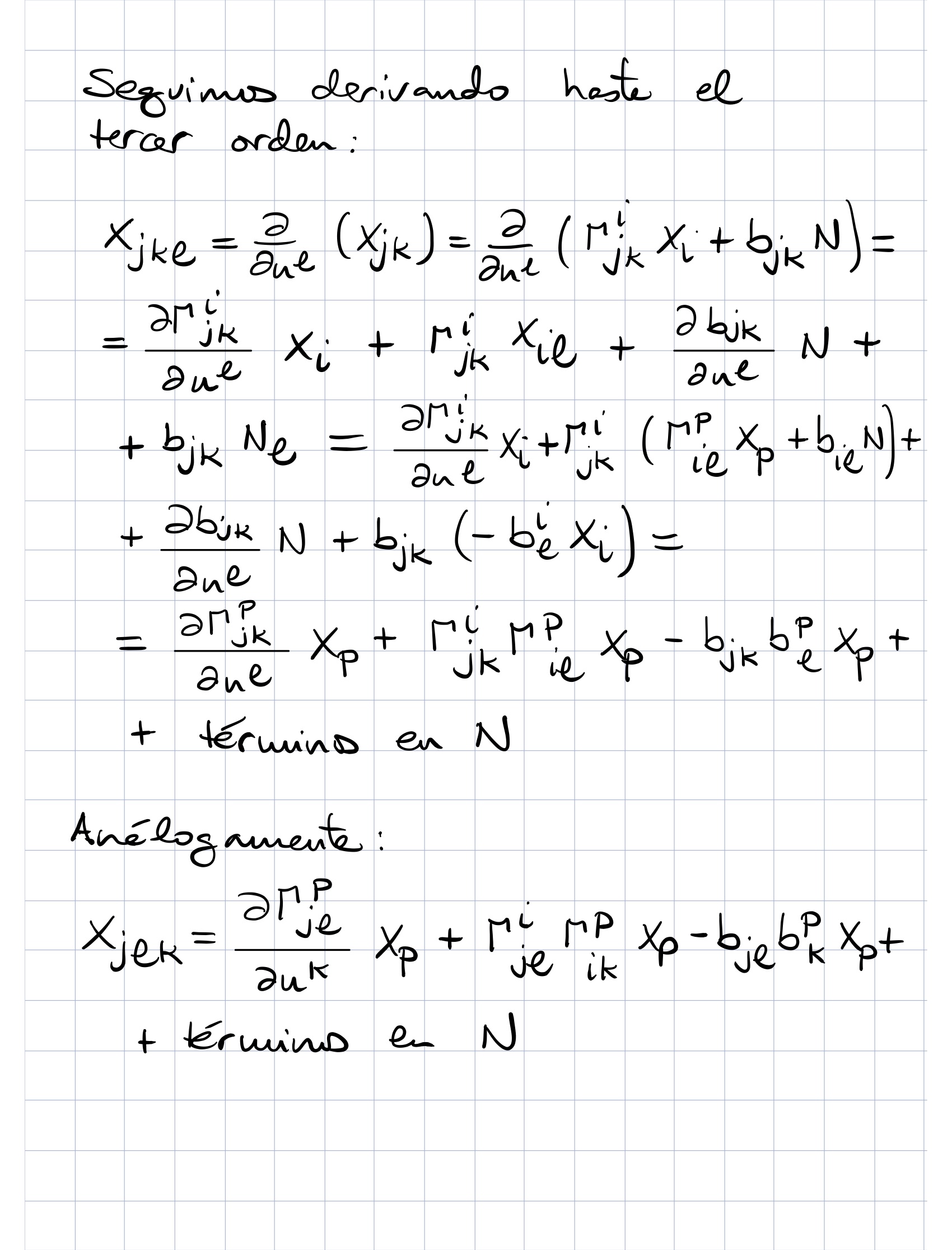
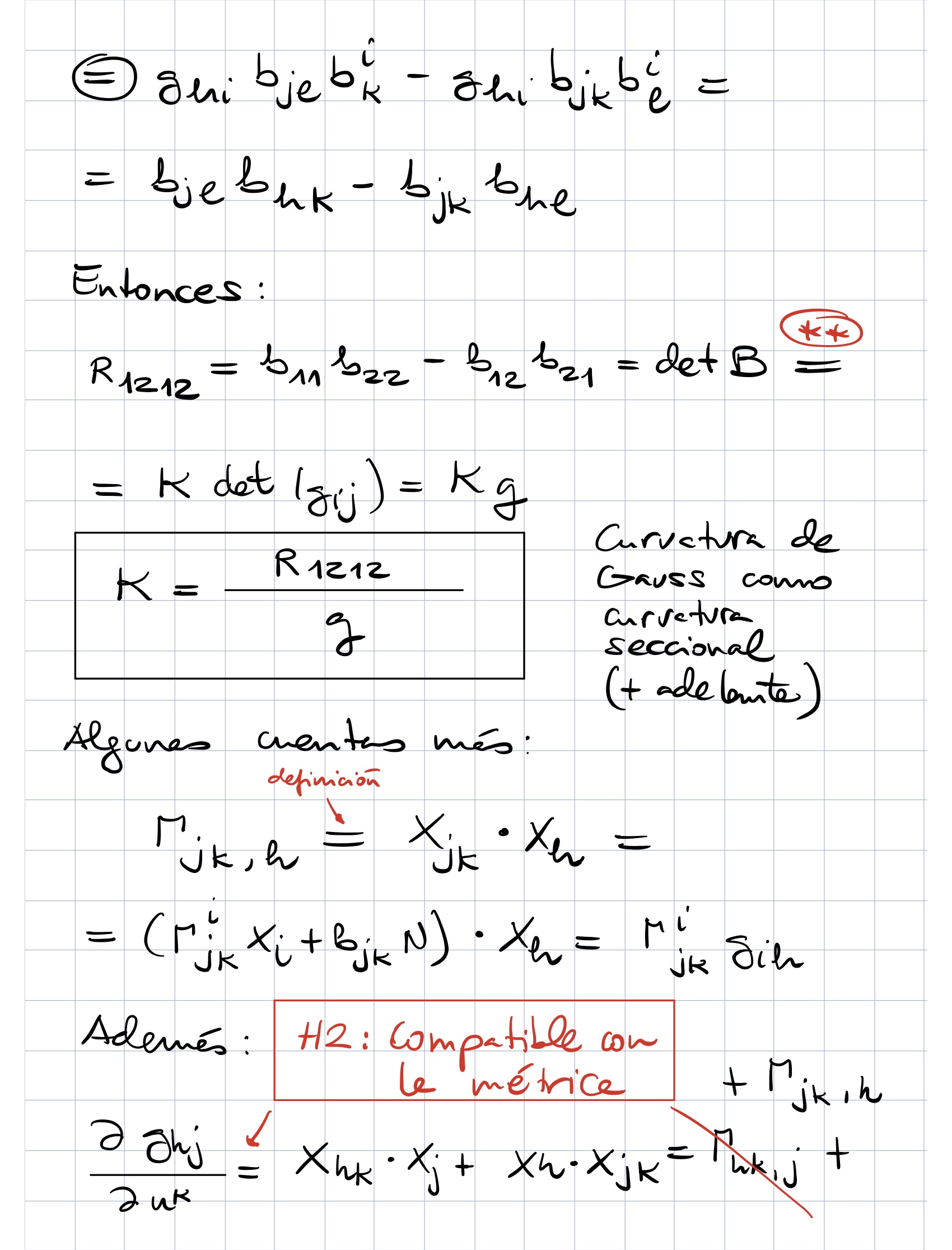
Vamos a recordar algunos conceptos básicos de la geometría de superficies de tercero. Además, aprovecharemos para hablar de métricas arbitrarias.